添加帧 (Python) [待校准@8390]
Goal目标: Learn了解如何向tf2添加额外的帧。 [待校准@8355]
Tutorial教程级别: Intermediate中级 [待校准@6713]
时间: 15分钟 [Alyssa@6755]
内容
背景
在之前的教程中,我们通过编写 tf2 broadcaster and a tf2 listener 重新创建了海龟例程。本教程将教您如何向转换树添加额外的固定和动态帧。实际上,在tf2中添加帧与创建tf2广播器非常相似,但是此示例将向您展示tf2的一些附加功能。 [待校准@8391]
许多任务转换,容易认为内本地帧。例如,最容易推理激光扫描仪中心帧中的激光扫描测量。tf2允许你定义本地帧每个传感器、连接或联合系统。当从一个帧,tf2会照顾所有隐藏中间帧转换介绍。 [待校准@8357]
tf2树 [待校准@8358]
tf2建立了帧的树结构,因此不允许在帧结构中出现闭环。这意味着一个帧只有一个父级,但它可以有多个子级。目前,我们的tf2树包含三个帧: world 、 turtle1 和 turtle2 。这两个海龟帧是 world 帧的孩子。如果要向tf2添加新帧,则现有的三个帧之一必须是父帧,而新帧将成为其子帧。 [待校准@8359]
任务
1编写固定帧广播器 [待校准@8360]
在我们的海龟例子中,我们将添加一个新的帧 carrot1 ,它将是 turtle1 的孩子。这一帧将作为第二只乌龟的目标。 [待校准@8361]
让我们先创建源文件。转到我们在之前的教程中创建的 learning_tf2_py 包。通过输入以下命令下载固定帧广播器代码: [待校准@8392]
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py
在Windows命令行提示符下: [待校准@8363]
curl -sk https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py -o fixed_frame_tf2_broadcaster.py
或者在powershell中: [待校准@8364]
curl https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/fixed_frame_tf2_broadcaster.py -o fixed_frame_tf2_broadcaster.py
现在打开调用ed fixed_frame_tf2_broadcaster.py 的文件。 [待校准@8393]
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
class FixedFrameBroadcaster(Node):
def __init__(self):
super().__init__('fixed_frame_tf2_broadcaster')
self.br = TransformBroadcaster(self)
self.timer = self.create_timer(0.1, self.broadcast_timer_callback)
def broadcast_timer_callback(self):
t = TransformStamped()
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'turtle1'
t.child_frame_id = 'carrot1'
t.transform.translation.x = 0.0
t.transform.translation.y = 2.0
t.transform.translation.z = 0.0
t.transform.rotation.x = 0.0
t.transform.rotation.y = 0.0
t.transform.rotation.z = 0.0
t.transform.rotation.w = 1.0
self.br.sendTransform(t)
def main():
rclpy.init()
node = FixedFrameBroadcaster()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()
不要忘记将节点添加到 setup.py 。该代码与tf2广播器教程示例非常相似,唯一的区别是此处的转换不会随时间变化。 [待校准@8394]
1.1检查代码 [待校准@8367]
让我们看一下这段代码中的关键行。在这里,我们创建了一个新的转换,从母 turtle1 到新 carrot1 。就 turtle1 帧而言, carrot1 帧在y轴上偏移了2米。 [待校准@8368]
t = TransformStamped()
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'turtle1'
t.child_frame_id = 'carrot1'
t.transform.translation.x = 0.0
t.transform.translation.y = 2.0
t.transform.translation.z = 0.0
1.2写launch文件 [待校准@8369]
现在让我们为这个例子创建一个launch文件。使用文本编辑器,创建一个调用ed turtle_tf2_fixed_frame_demo.launch.py 的新文件,并添加以下几行: [待校准@8370]
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
demo_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('learning_tf2_py'), 'launch'),
'/turtle_tf2_demo.launch.py']),
)
return LaunchDescription([
demo_nodes,
Node(
package='learning_tf2_py',
executable='fixed_frame_tf2_broadcaster',
name='fixed_broadcaster',
),
])
这个launch文件导入所需的包,然后创建一个 demo_nodes 变量,该变量将存储我们在上一教程的launch文件中创建的节点。 [待校准@8371]
最后部分的代码添加固定 carrot1 帧的turtlesim世界我们 fixed_frame_tf2_broadcaster 节点。 [待校准@8372]
Node(
package='learning_tf2_py',
executable='fixed_frame_tf2_broadcaster',
name='fixed_broadcaster',
),
1.3构建和运行 [待校准@8373]
重建包并启动turtle广播器例程: [待校准@8374]
ros2 launch learning_tf2_py turtle_tf2_fixed_frame_demo.launch.py
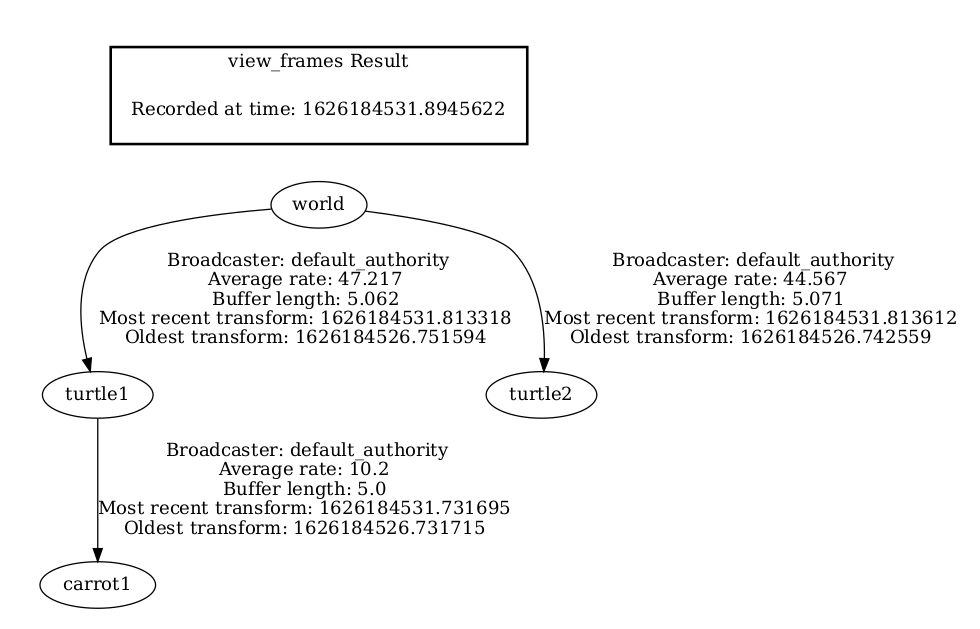
您应该注意到新的 carrot1 帧出现在转换树中。 [待校准@8375]
1.4检查结果 [待校准@8376]
如果你开着第一只乌龟到处跑,你应该注意到行为与之前的教程没有改变,即使我们添加了一个新的帧。这是因为添加额外的帧不会影响其他帧,并且我们的侦听器仍在使用先前定义的帧。 [待校准@8377]
因此,如果我们想让我们的第二只乌龟跟随胡萝卜而不是第一只乌龟,我们需要改变 target_frame 的价值。这可以通过两种方式完成。一种方法是直接从控制台将 target_frame 参数传递给launch文件: [待校准@8378]
ros2 launch learning_tf2_py turtle_tf2_fixed_frame_demo.launch.py target_frame:=carrot1
第二种方法是更新launch文件。为此,打开 turtle_tf2_fixed_frame_demo.launch.py 文件,并通过 launch_arguments 参数添加 “'target_frame': 'carrot1'” 参数。 [待校准@8379]
def generate_launch_description():
demo_nodes = IncludeLaunchDescription(
...,
launch_arguments={'target_frame': 'carrot1'}.items(),
)
现在只要重建包装,重新启动 turtle_tf2_fixed_frame_demo.launch.py ,你就会看到第二只乌龟跟着胡萝卜,而不是第一只乌龟! [待校准@8380]

2编写动态帧广播器 [待校准@8381]
我们在本教程中发布的额外帧是固定帧,相对于父帧不会随时间变化。但是,如果要发布移动帧,则可以对广播器进行编码以随时间更改帧。让我们改变我们的 carrot1 帧,使其相对于 turtle1 帧随时间变化。现在,通过输入以下命令下载动态帧广播器代码: [待校准@8382]
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py
wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py
在Windows命令行提示符下: [待校准@8363]
curl -sk https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py -o dynamic_frame_tf2_broadcaster.py
或者在powershell中: [待校准@8364]
curl https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/dynamic_frame_tf2_broadcaster.py -o dynamic_frame_tf2_broadcaster.py
现在打开调用ed dynamic_frame_tf2_broadcaster.py 的文件: [待校准@8395]
import math
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
class DynamicFrameBroadcaster(Node):
def __init__(self):
super().__init__('dynamic_frame_tf2_broadcaster')
self.br = TransformBroadcaster(self)
self.timer = self.create_timer(0.1, self.broadcast_timer_callback)
def broadcast_timer_callback(self):
seconds, _ = self.get_clock().now().seconds_nanoseconds()
x = seconds * math.pi
t = TransformStamped()
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'turtle1'
t.child_frame_id = 'carrot1'
t.transform.translation.x = 10 * math.sin(x)
t.transform.translation.y = 10 * math.cos(x)
t.transform.translation.z = 0.0
t.transform.rotation.x = 0.0
t.transform.rotation.y = 0.0
t.transform.rotation.z = 0.0
t.transform.rotation.w = 1.0
self.br.sendTransform(t)
def main():
rclpy.init()
node = DynamicFrameBroadcaster()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()
2.1检查代码 [待校准@8007]
代替我们的x和y偏移的固定定义,我们在当前时间使用 sin() 和 cos() 函数,以便 carrot1 的偏移不断变化。 [待校准@8384]
seconds, _ = self.get_clock().now().seconds_nanoseconds()
x = seconds * math.pi
...
t.transform.translation.x = 10 * math.sin(x)
t.transform.translation.y = 10 * math.cos(x)
2.2写launch文件 [待校准@8385]
测试此代码,创建新launch文件 turtle_tf2_dynamic_frame_demo.launch.py 并粘贴以下代码: [待校准@8386]
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
demo_nodes = IncludeLaunchDescription(
PythonLaunchDescriptionSource([os.path.join(
get_package_share_directory('learning_tf2_py'), 'launch'),
'/turtle_tf2_demo.launch.py']),
launch_arguments={'target_frame': 'carrot1'}.items(),
)
return LaunchDescription([
demo_nodes,
Node(
package='learning_tf2_py',
executable='dynamic_frame_tf2_broadcaster',
name='dynamic_broadcaster',
),
])
2.3构建和运行 [待校准@8387]
重建包,启动 turtle_tf2_dynamic_frame_demo.launch.py launch文件,现在你会看到第二只乌龟跟随胡萝卜不断变化的位置。 [待校准@8388]
总结
在本教程中,您将了解tf2转换树、其结构及其特性。您还了解到在本地帧内部进行思考是最容易的,并且学习了为该本地帧添加额外的固定和动态帧。 [待校准@8389]